Authoring and Evaluating Autonomous Virtual Human Simulations
Mubbasir Kapadia
Advisor: Petros Faloutsos
Committee: Demetri Terzopoulos, Glenn Reinman, Eddo Stern
PhD Thesis, University of California, Los Angeles. August 2011
[more]
Research in virtual human simulation has seen a dramatic rise in recent years with its applicability being realized in a large number of areas, ranging from games and entertainment to education and urban simulations. The problem that we face is three-fold: First, a unified framework for efficiently simulating functional, purposeful autonomous virtual humans is yet to be realized. Second, the size of crowds that modern computer games and urban simulations are capable of handling has given rise to the challenging problem of evaluating and testing massive simulations of autonomous agents. Third, there exists no appropriate interface to allow end-users to author complex interactions between autonomous actors that populate the simulated environment.
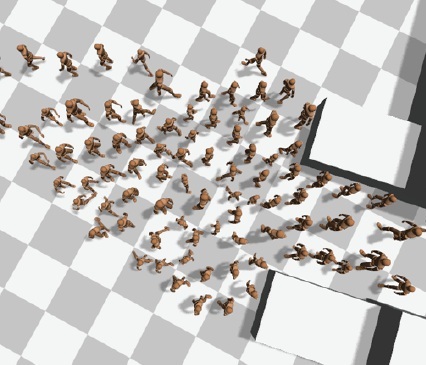
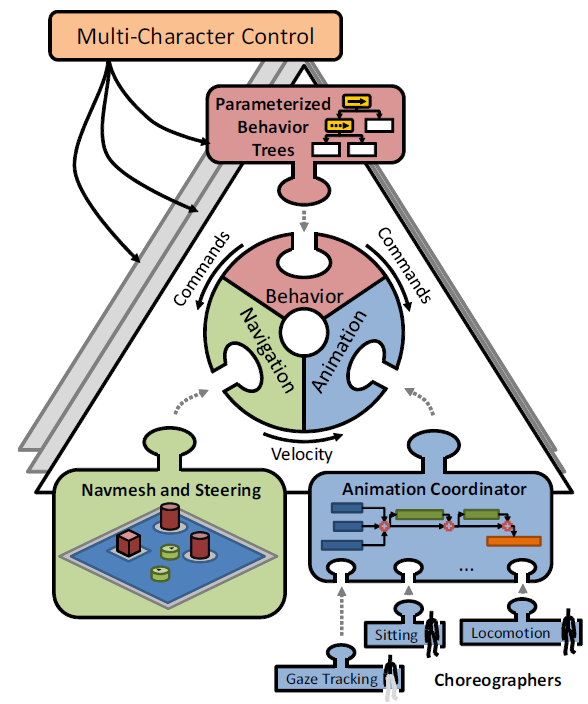
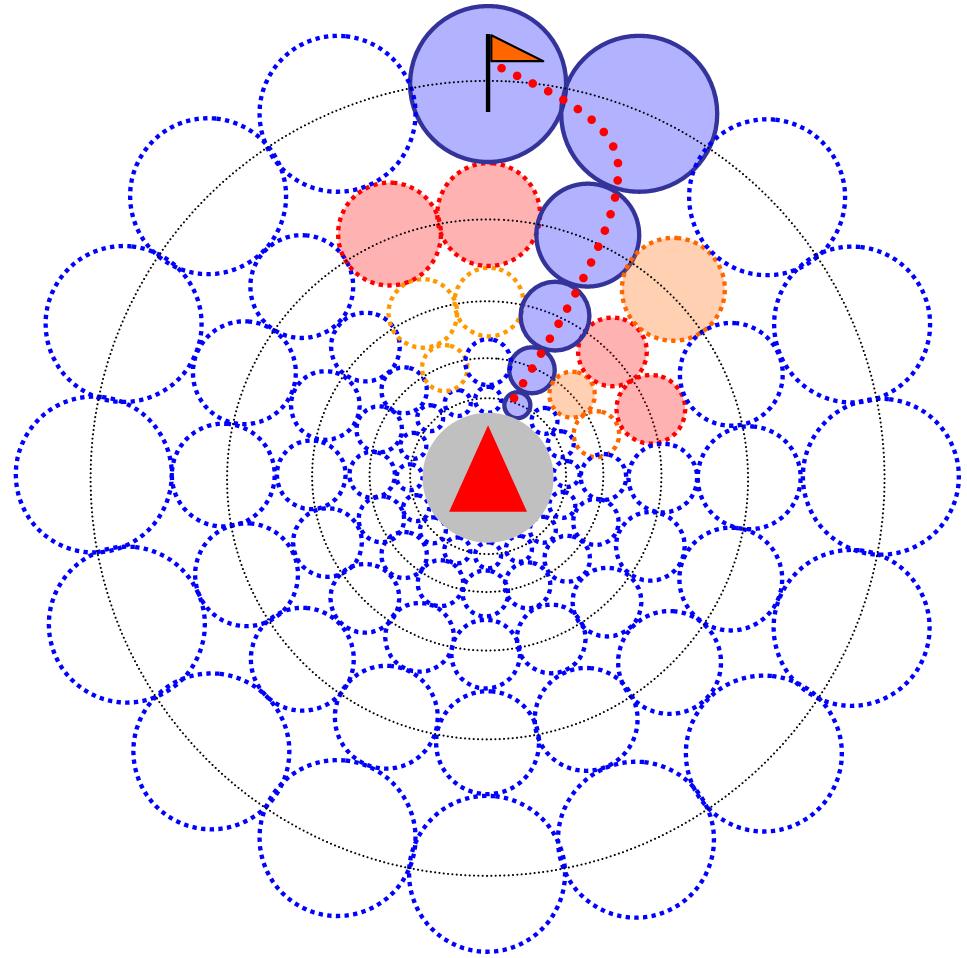
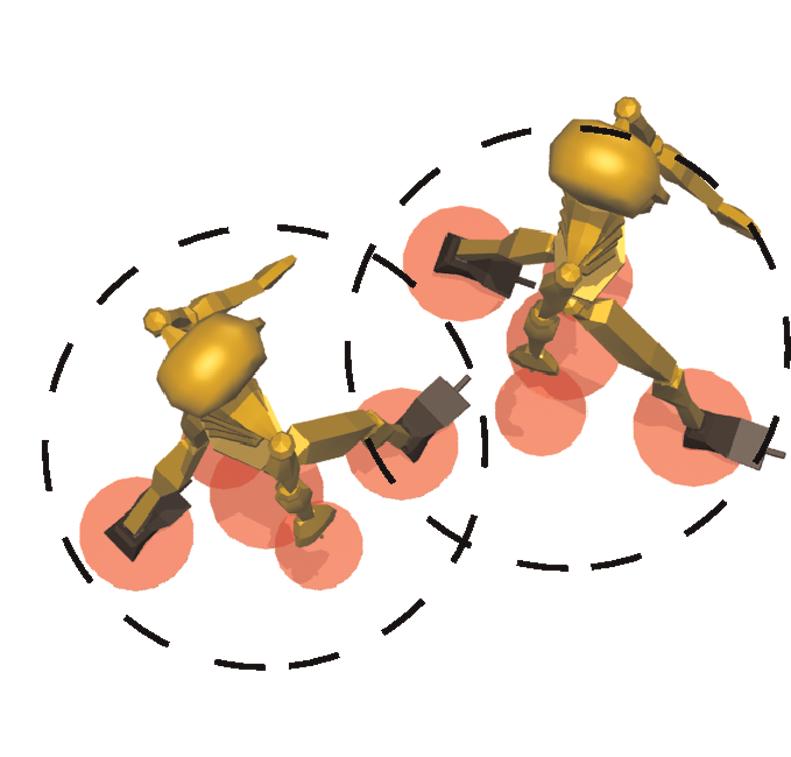
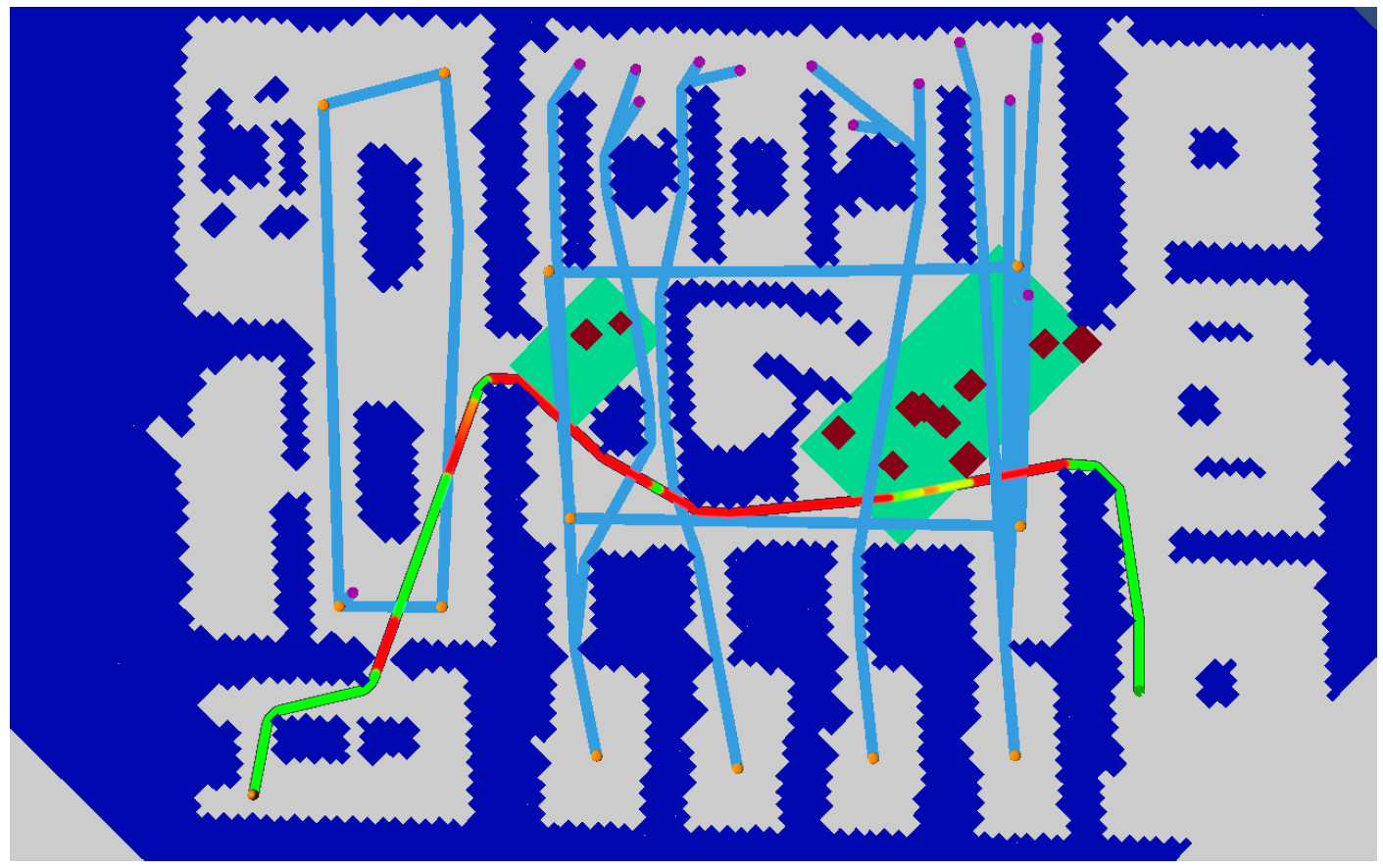
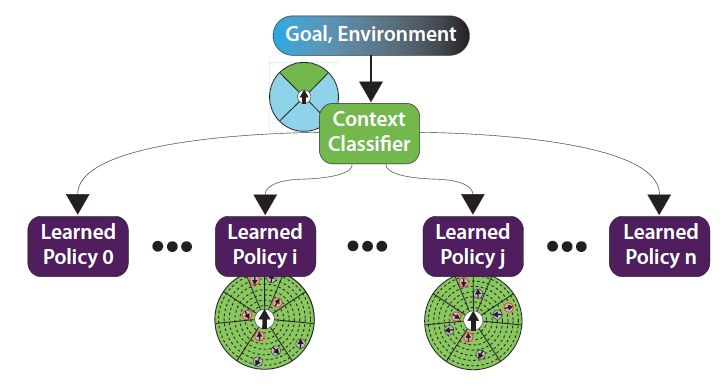
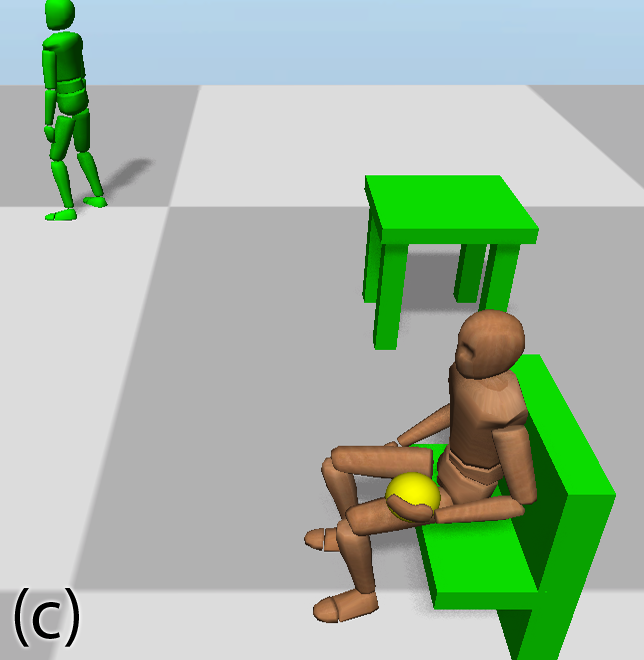
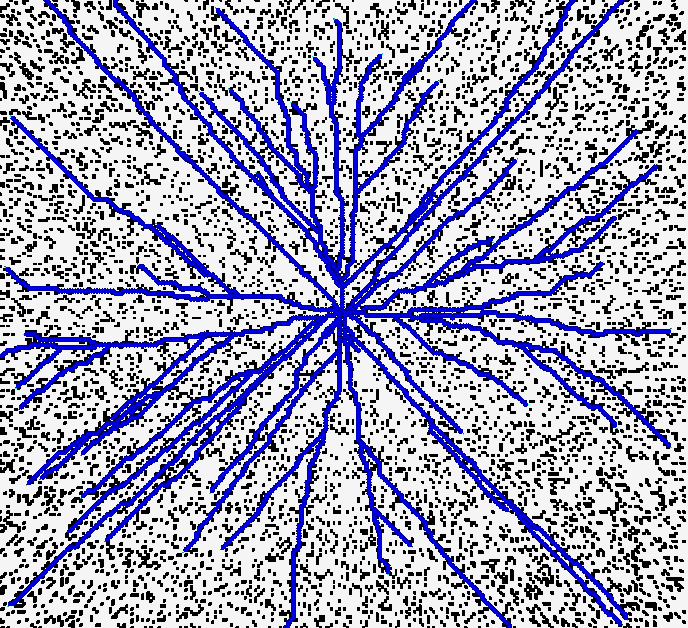
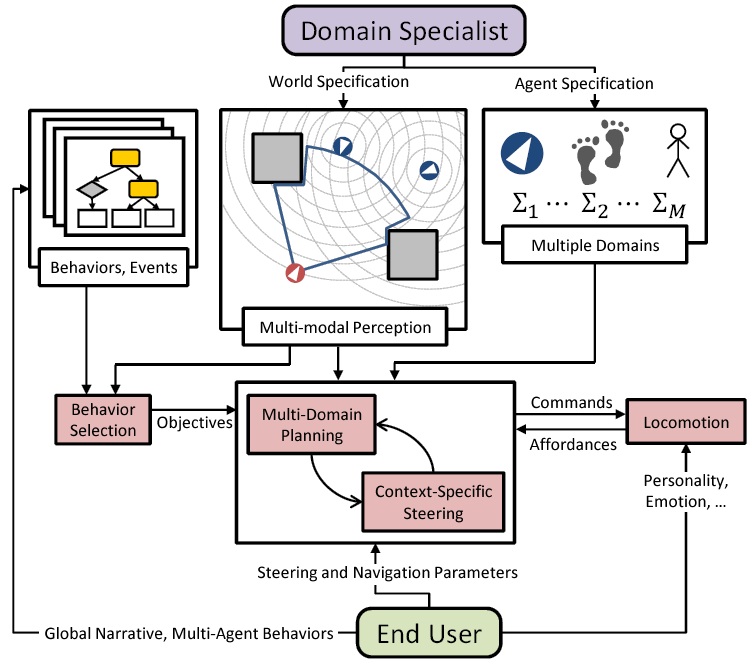
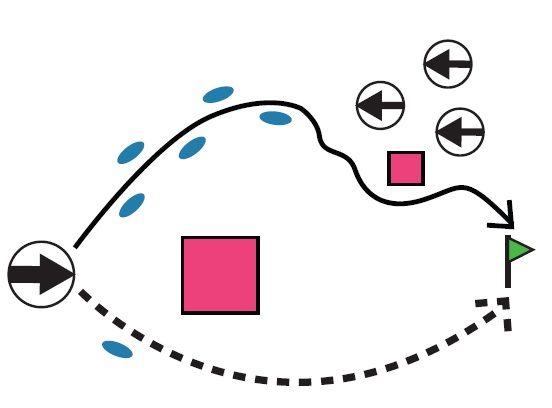
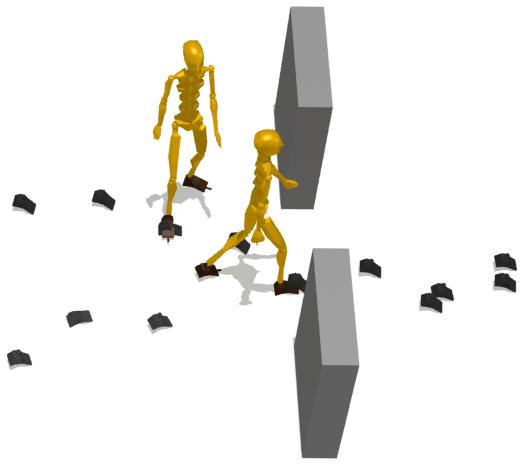
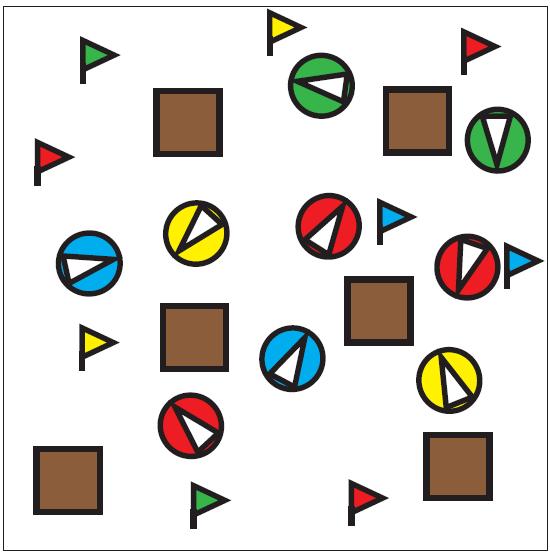
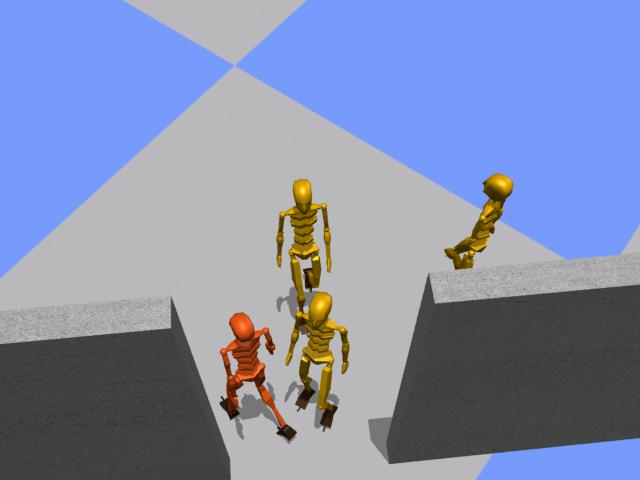
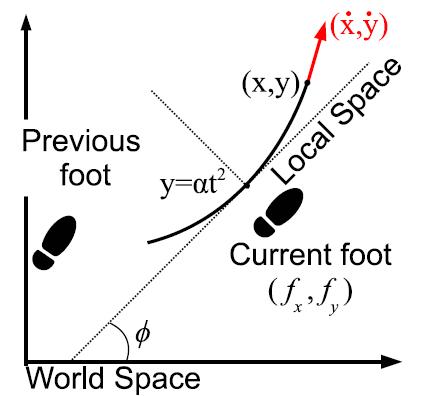
First, we present a general framework for local path-planning and steering that can be easily extended to perform high-level behaviors. Our framework is based on the concept of affordances -- the possible ways an agent can interact with its environment. Each agent perceives the environment through a set of fields that are represented in the agent's local space. This egocentric property allows us to efficiently compute a local space-time plan. Using our framework, we demonstrate autonomous virtual pedestrians that perform steering and path planning in unknown environments along with the emergence of high-level responses to never seen before situations.
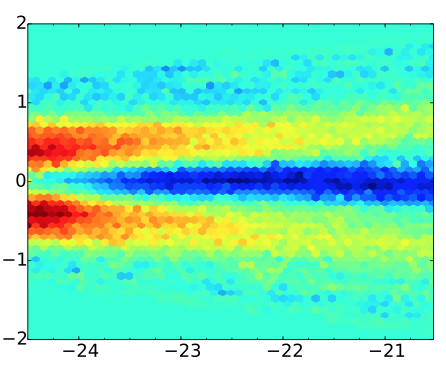
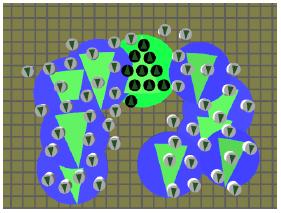
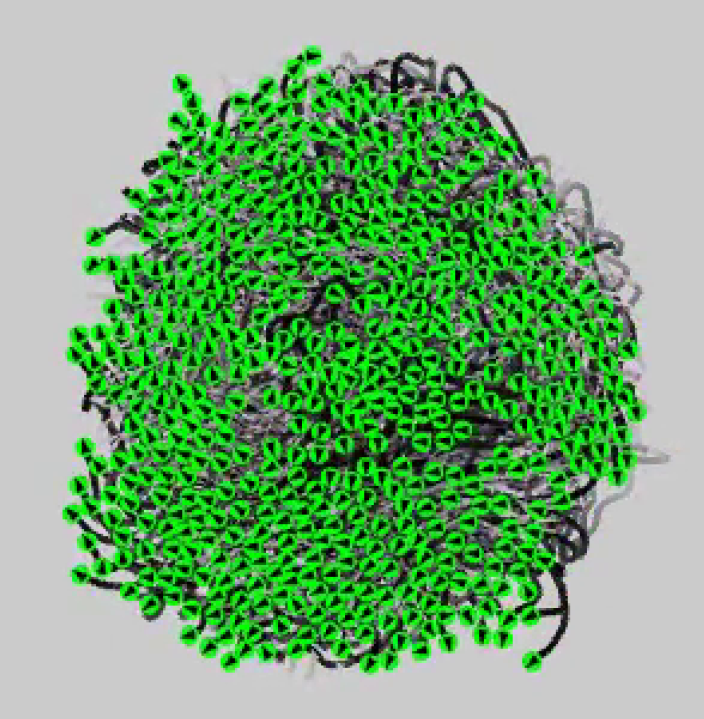
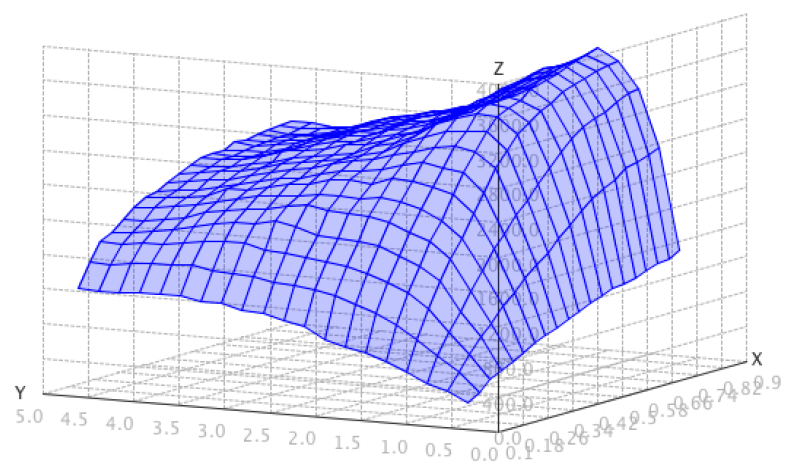
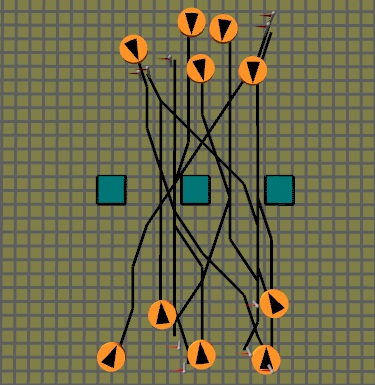
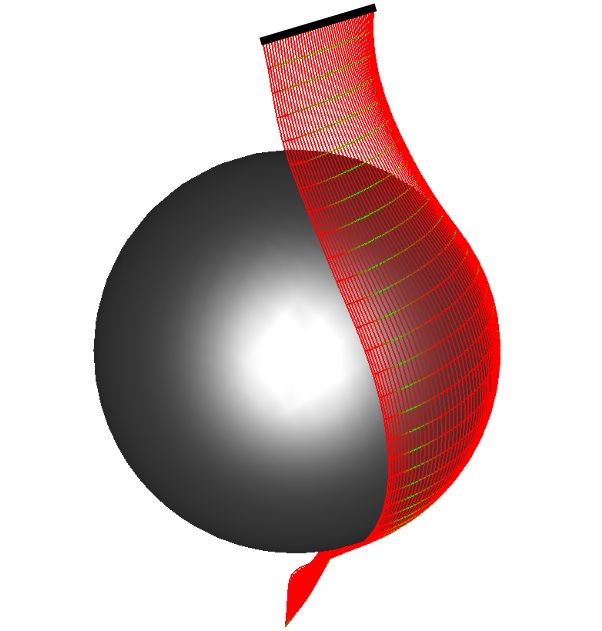
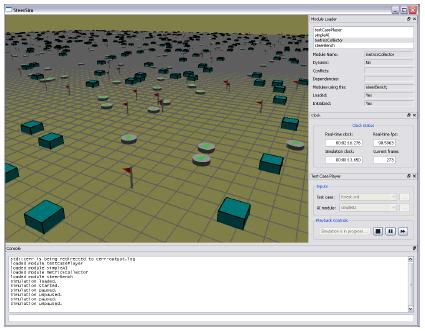
Second, we propose a method of computing coverage, quality and failure for steering algorithms. We characterize and analyze the complete space of steering scenarios that an agent may encounter in dynamic situations. Then, we propose the representative scenario space and a sampling method that can generate subsets of the representative space with good statistical properties. We also propose a new set of metrics and a statistically robust approach to determining the coverage and the quality of a steering algorithm in this space. We demonstrate the effectiveness of our approach on three state of the art techniques. Our results show that these methods can only solve 60% of the scenarios in the representative scenario space.
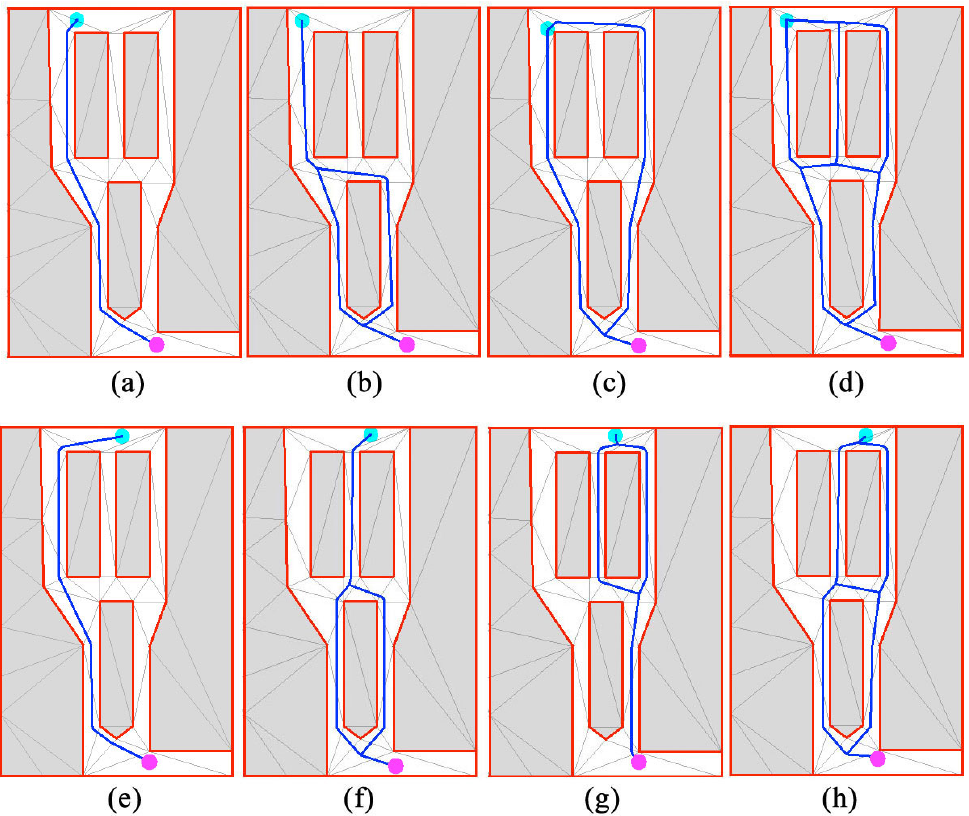
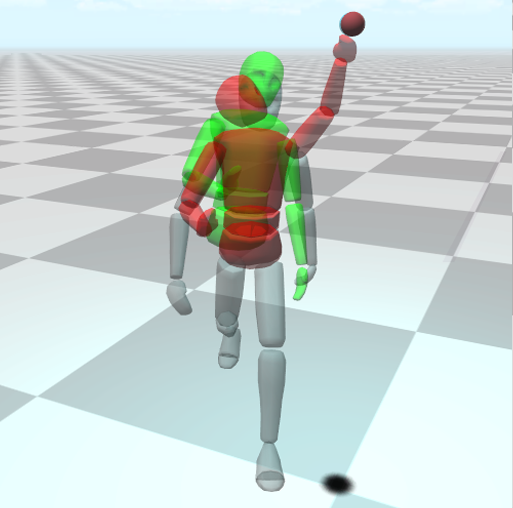
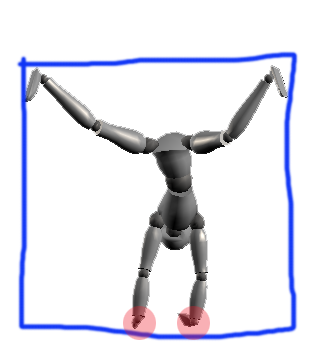
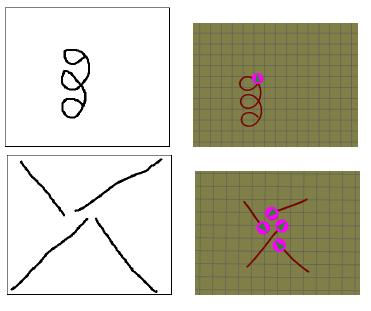
Third, we present an interactive tool for specifying and detecting steering behaviors. Our framework computes a set of time-varying metrics for agents and their environment, which characterize steering behaviors. We identify behaviors of interest by applying conditions (rules) or user defined sketches on the associated metrics. The behaviors we can specify and detect include unnatural steering, plainly incorrect results, or application-specific behaviors of interest. Our framework is extensible and independent to the specifics of any steering approach. To our knowledge, this is the first work that aims to provide a computational framework for specifying and detecting crowd behaviors in animation.
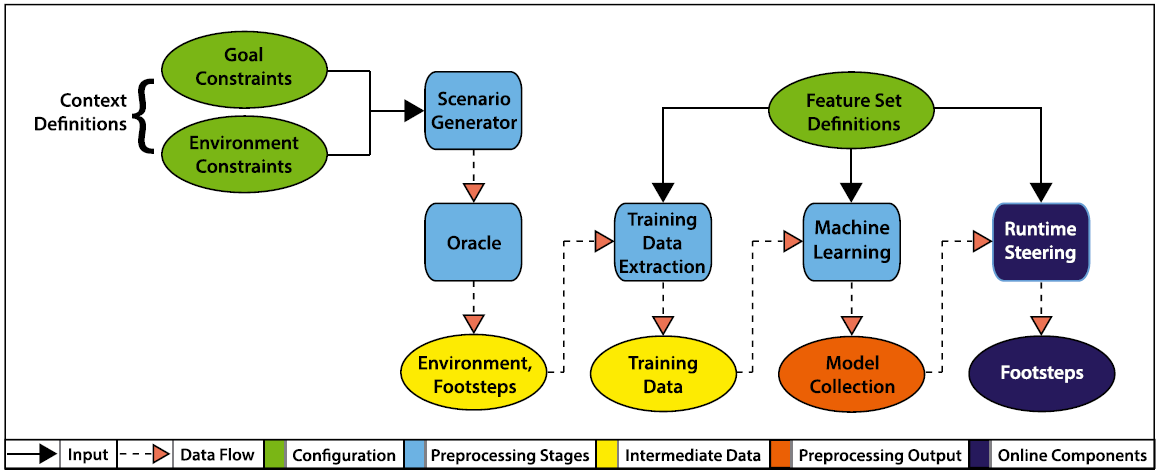
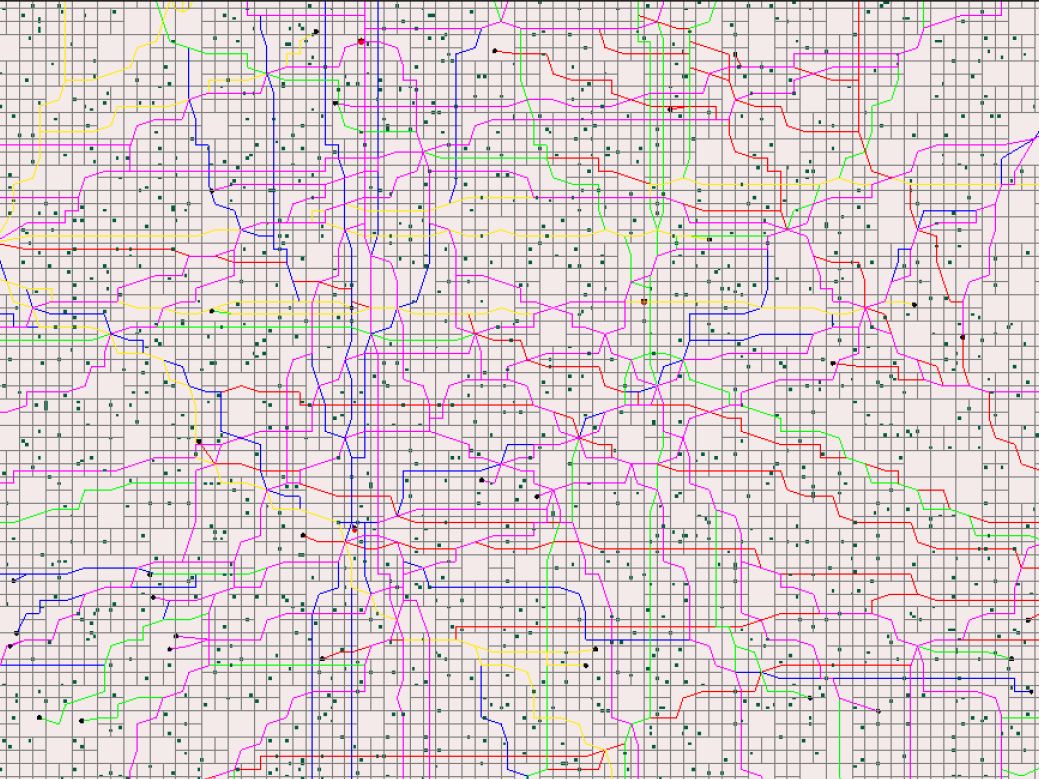
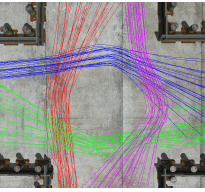
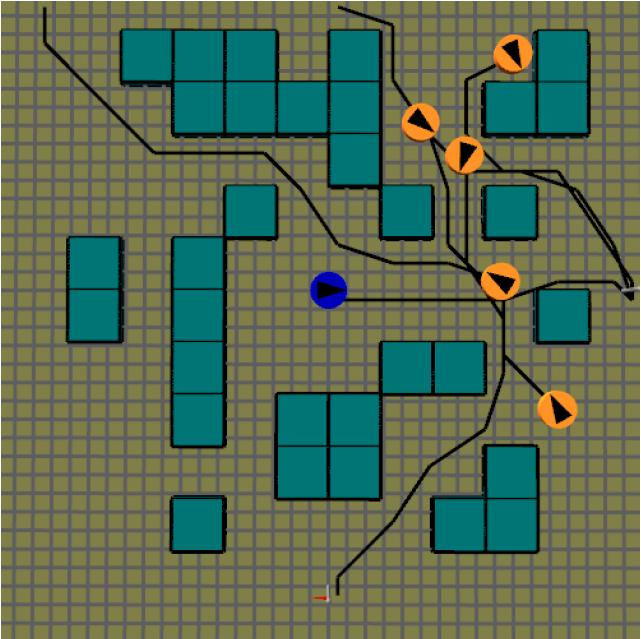
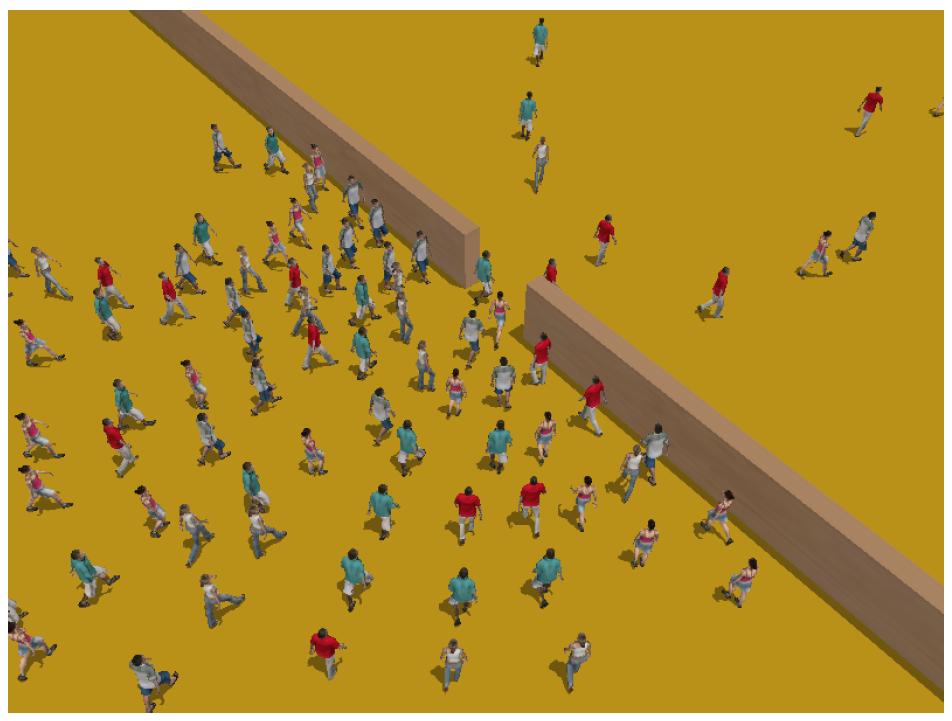
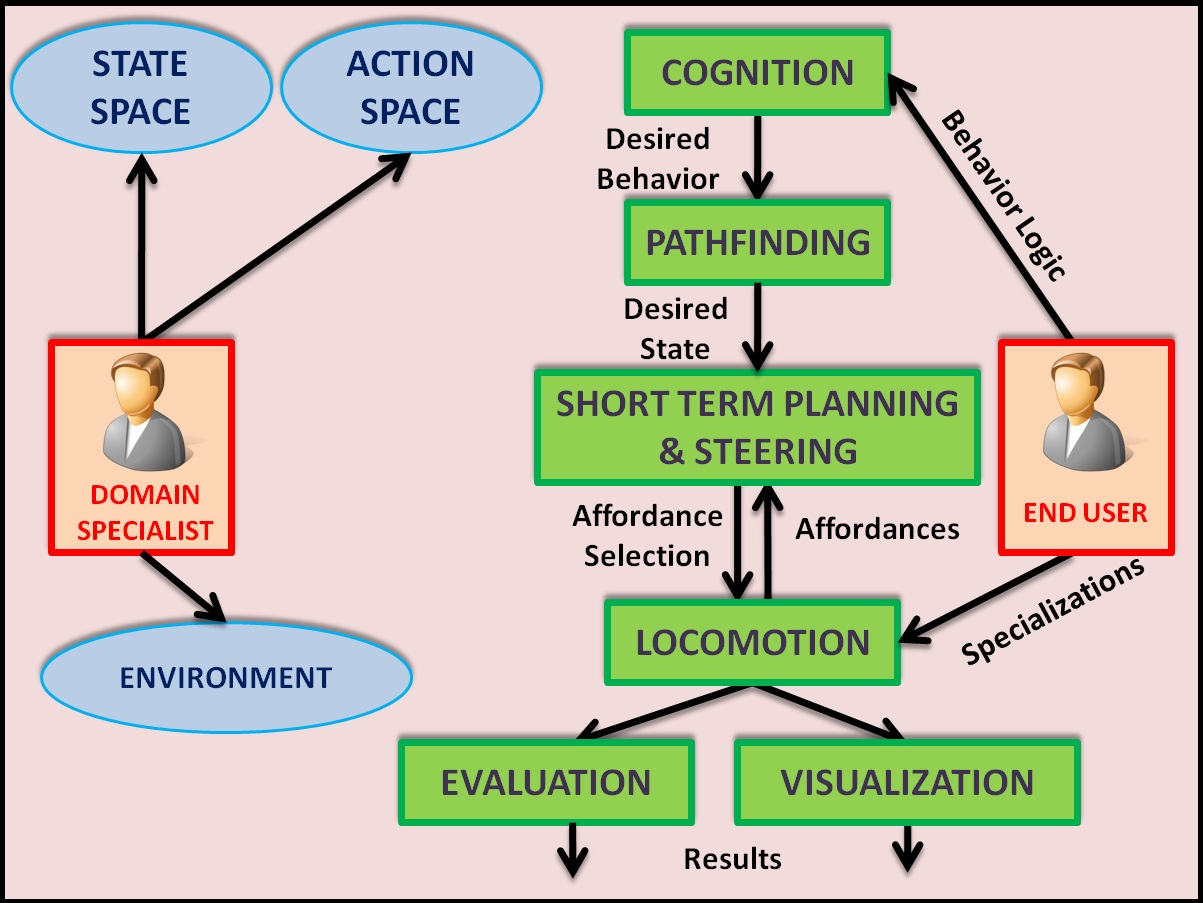
Fourth, we propose an authoring framework which provides the user with complete control over the domain of the system: the state space, action space and cost of executing actions. Actors are specialized using effect and cost modifiers, which modify existing action definitions, and constraints, which prune action choices in a state-dependent manner. Behaviors are used to define goals and objective functions for an actor. Actors having common or conflicting goals are grouped together to form a composite domain, and a multi-agent planner is used to generate complicated interactions between multiple actors. We demonstrate the effectiveness of our framework by authoring and generating a city simulation involving complicated interactions between multiple pedestrians and vehicles.
[less]