Abstract
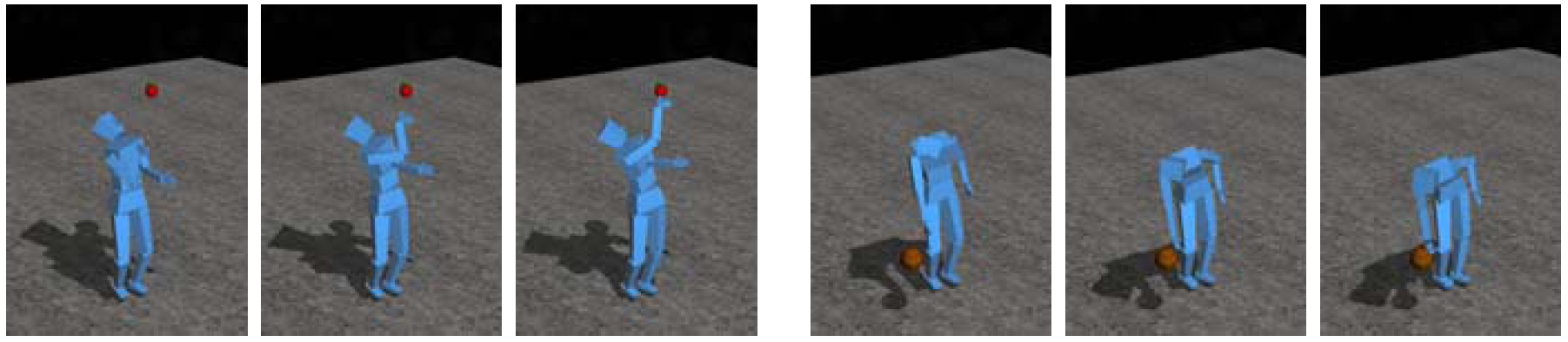
We present a full-body motor control mechanism that generates coordinated and diverse motion during a reaching action. Our framework animates the full human body (stretching arms, flexing of the spine, as well as stepping forward) to facilitate the desired end effector behavior. We propose a hierarchical control system for controlling the arms, spine, and legs of the articulated character and present a controller-scheduling algorithm for coordinating the sub-controllers. High-level parameters can be used to produce variation in the movements for specific reaching tasks. We demonstrate a wide set of behaviors such as stepping and squatting to reach low distant targets, twisting and swinging up to reach high lateral targets, and we show variation in the synthesized motions.
Related Articles

Full-Body Hybrid Motor Control For Reaching
Wenjia Huang, Mubbasir Kapadia and Demetri TerzopoulosInternational Conference on Motion in Games, October 2010
Bibtex
Videos
Download here