Abstract

This paper presents a real-time planning framework for multi-character navigation that enables the use of multiple heterogeneous problem domains of differing complexities for navigation in large, complex, dynamic virtual environments. The original navigation problem is decomposed into a set of smaller problems that are distributed across planning tasks working in these different domains. An anytime dynamic planner is used to efficiently compute and repair plans for each of these tasks, while using plans in one domain to focus and accelerate searches in more complex domains. We demonstrate the benefits of our framework by solving many challenging multi-agent scenarios in complex dynamic environments requiring space-time precision and explicit coordination between interacting agents, by accounting for dynamic information at all stages of the decision-making process.
Related Articles
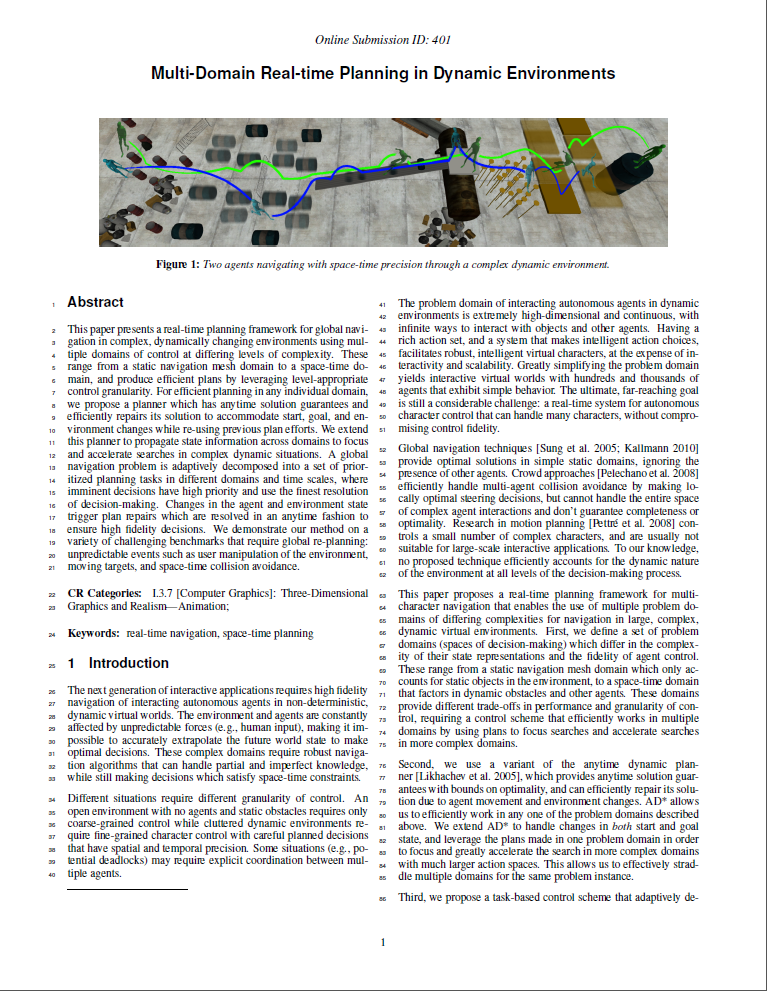
Multi-Domain Real-time Planning in Dynamic Environments
Mubbasir Kapadia, Alejandro Porres, Francisco Garcia, Nuria Pelechano, and Norman I. BadlerACM SIGGRAPH/EUROGRAPHICS Symposium of Computer Animation, SCA 2013.
Bibtex Supplementary Document
Videos