Abstract
This paper addresses the problem of group path planning while maintaining group coherence and persistence. Group coherence ensures that a group minimizes both longitudinal and lateral dispersion, and is achieved with the introduction of a deformation penalty to the cost formulation. When the deformation penalty is significantly high, a group may split and later merge. Group persistence is modeled by introducing split and merge actions in the action space, and adding a split penalty to the cost measure. We formulate the problem domain (state, action space, and cost formulation), present our path planning approach for coherent and persistent groups, and provide empirical results demonstrating the capabilities of our method on a variety of challenging scenarios.
Related Articles

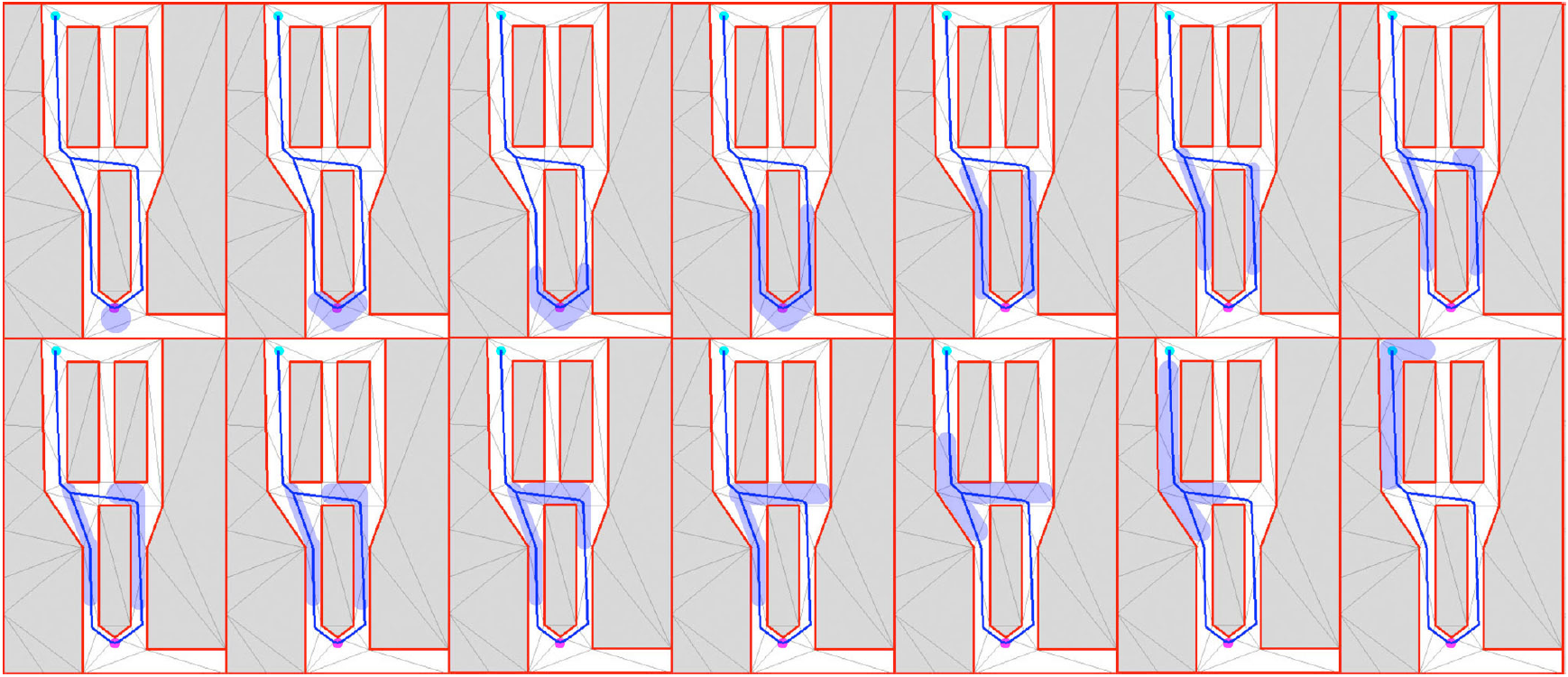
Path Planning for Coherent and Persistent Groups
Tianyu Huang, Mubbasir Kapadia, Norman I. Badler, and Marcelo KallmannIEEE International Conference on Robotics and Automation, June 2014
Bibtex
Videos
Download here