- June 2024: DAP has been accepted to IROS 2024.
- June 2024: LGMCTS has been accepted to IROS 2024.
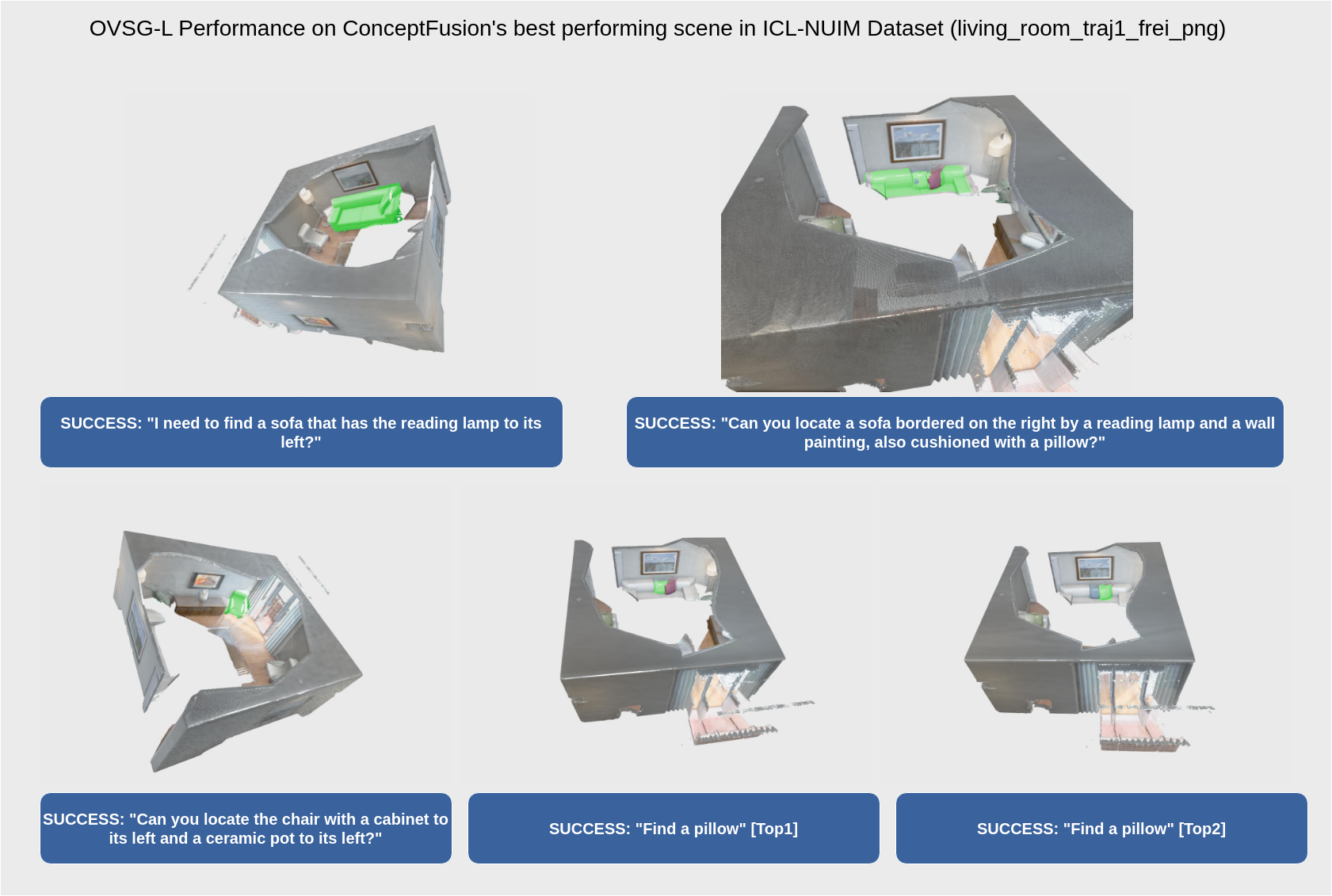
- Aug 2023: OVSG has been accepted to CoRL 2023.
- Jan 2023: I have joined Rutgers Robot Learning Lab as a graduate student researcher.

Hello, I'm Kowndinya Boyalakuntla
I am a graduate student at Rutgers University, where I work on robot learning, manipulation and language-guided robotics. I am advised by Abdeslam Boularias. Previously, I was an undergraduate student at the IIT Tirupati advised by Sridhar Chimalakonda and Kalidas Yeturu.