Linear Algebra: Gaussian Elimination
Contents
Gaussian elimination aims to transform a system of linear equations
into an upper-triangular matrix in order to solve the unknowns and
derive a solution. A pivot column is used to reduce the rows before it;
then after the transformation, back-substitution is applied.

Example
Gaussian elimination is a method for solving matrix equations of the form 
(1) To perform Gaussian elimination starting with the system of equations
(2) Compose the "augmented matrix equation"
(3) Here, the column vector in the variables X is carried along for labeling the matrix rows.
Now, perform elementary row operations to put the augmented matrix into the upper triangular form
(4) Solve the equation of the th row for , then substitute back into the equation of the (k-1)st row to
obtain a solution for Xk-1, etc., according to the formula
Example taken from:
http://mathworld.wolfram.com/GaussianElimination.html
Code
for (int i = 0; i < N-1; i++) {
for (int j = i; j < N; j++) {
double ratio = A[j][i]/A[i][i];
for (int k = i; k < N; k++) {
A[j][k] -= (ratio*A[i][k]);
b[j] -= (ratio*b[i]);
}
}
}
-
Which Loops Are Parallelizable?
-
Loops in which num of iterations known upon entry, and does not change.
-
Loops in which each iteration independent of all others.
-
Loops that contain no data dependence.
- Observe the sequential code for Guassian Elimination provided above.
-
We have three possible candidate loops to parallelize. Which one should we select?
-
First, we need to really understand how Gaussian Elimination works. This picture could help:
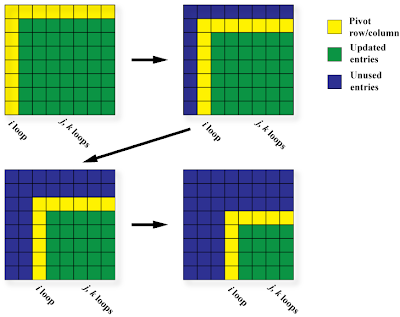
(Picture taken from- http://riebecca.blogspot.com/2008/12/supercomputing-course-openmp-syntax-and_15.html)
Gaussian elimination can be understood through the four frames of this picture, now we need to decide which loops to parallelize.
-
The i loop is represented by the yellow row and column. The entries in the yellow row and column are being used to update the green sub matrix before going on to row/column i+1, meaning the values of the entries in the (i+1)st yellow area depend on what operations were performed on them at previous values of i. Therefore we can't use OpenMP to parallelize this loop because of data dependence.
-
The j loop has a number of iterations that varies with i, but we do know the number of iterations every time we are about to enter the loop. None of the later iterations depend on the earlier ones and the iterations can be computed in any order! So the j loop is parallelizable.
-
The k loop, like the j loop, has a number of iterations that varies but is calculable for every i. None of the later iterations depend on earlier ones, and they can all be computed in any order. Therefore the k loop is also parallelizable.
-
It's best to select the outer loop (j), because then we'll have more uninterrupted parallelism and less forks and joins..
-
Gaussian Elimination using OpenMP:
for (int i = 0; i < N-1; i++) {
#pragma omp parallel for
for (int j = i; j < N; j++) {
double ratio = A[j][i]/A[i][i];
for (int k = i; k < N; k++) {
A[j][k] -= (ratio*A[i][k]);
b[j] -= (ratio*b[i]);
}
}
}
OpenMP Parallel Version of the Forward Elimination Algorithm
(This section is taken from- http://hpds.ee.kuas.edu.tw/download/parallel_processing/96/96present/20071212/Gaussian)
Code:
do pivot = 1, (n-1)
!$omp parallel do private(xmult) schedule(runtime)
do i = (pivot+1), n
xmult = a(i,pivot) / a(pivot,pivot)
do j = (pivot+1), n
a(i,j) = a(i,j) - (xmult * a(pivot,j))
end do
b(i) = b(i) - (xmult * b(pivot))
end do
!$omp end parallel do
end do
With a static scheme and a specified chunk size, each
processor is statically allocated chunk iterations. The
allocation of iterations is done at the beginning of the
loop, and each thread will only execute those iterations
assigned to it. Using static without a specified chunk size
implies the system default chunk size of n/p. Using a
dynamic scheme, each thread is allocated a chunk of
iterations at the beginning of the loop, but the exact set of
iterations that are allocated to each thread is not known
Time Analysis:

root = 0
chunk = n**2/p
! main loop
do pivot = 1, n-1
! root maintains communication
if (my_rank.eq.0) then
! adjust the chunk size
if (MOD(pivot, p).eq.0) then
chunk = chunk - n
endif
! calculate chunk vectors
rem = MOD((n**2-(n*pivot)),chunk)
tmp = 0
do i = 1, p
tmp = tmp + chunk
if (tmp.le.(n**2-(n*pivot))) then
a_chnk_vec(i) = chunk
b_chnk_vec(i) = chunk / n
else
a_chnk_vec(i) = rem
b_chnk_vec(i) = rem / n
rem = 0
endif
continue
! calculate displacement vectors
a_disp_vec(1) = (pivot*n)
b_disp_vec(1) = pivot
do i = 2, p
a_disp_vec(i) = a_disp_vec(i-1)
+ a_chnk_vec(i-1)
b_disp_vec(i) = b_disp_vec(i-1)
+ b_chnk_vec(i-1)
continue
! fetch the pivot equation
do i = 1, n
pivot_eqn(i) = a(n-(i-1),pivot)
continue
pivot_b = b(pivot)
endif ! my_rank.eq.0
! distribute the pivot equation
call MPI_BCAST(pivot_eqn, n,
MPI_DOUBLE_PRECISION,
root, MPI_COMM_WORLD, ierr)
call MPI_BCAST(pivot_b, 1,
MPI_DOUBLE_PRECISION,
root, MPI_COMM_WORLD, ierr)
! distribute the chunk vector
call MPI_SCATTER(a_chnk_vec, 1, MPI_INTEGER,
chunk, 1, MPI_INTEGER,
root, MPI_COMM_WORLD, ierr)
! distribute the data
call MPI_SCATTERV(a, a_chnk_vec, a_disp_vec,
MPI_DOUBLE_PRECISION,
local_a, chunk,
MPI_DOUBLE_PRECISION,
root, MPI_COMM_WORLD,ierr)
call MPI_SCATTERV(b, b_chnk_vec, b_disp_vec,
MPI_DOUBLE_PRECISION,
local_b, chunk/n,
MPI_DOUBLE_PRECISION,
root, MPI_COMM_WORLD,ierr)
! forward elimination
do j = 1, (chunk/n)
xmult = local_a((n-(pivot-1)),j) / pivot_eqn(pivot)
do i = (n-pivot), 1, -1
local_a(i,j) = local_a(i,j)
- (xmult * pivot_eqn(n-(i-1)))
continue
local_b(j) = local_b(j) - (xmult * pivot_b)
continue
! restore the data to root
call MPI_GATHERV(local_a, chunk,
MPI_DOUBLE_PRECISION,
a, a_chnk_vec, a_disp_vec,
MPI_DOUBLE_PRECISION,
root, MPI_COMM_WORLD, ierr)
call MPI_GATHERV(local_b, chunk/n,
MPI_DOUBLE_PRECISION,
b, b_chnk_vec, b_disp_vec,
MPI_DOUBLE_PRECISION,
root, MPI_COMM_WORLD, ierr)
continue ! end of main loop
http://hpds.ee.kuas.edu.tw/download/parallel_processing/96/96present/20071212/Gaussian.pdf
MPI parallel results using 2 processors
| n |
Communication Time |
Workload Time |
Total Time |
| 400 |
2.15 |
0.72 |
2.88 |
| 800 |
18.28 |
5.76 |
24.03 |
| 1200 |
70.98 |
19.68 |
90.66 |
http://hpds.ee.kuas.edu.tw/download/parallel_processing/96/96present/20071212/Gaussian.pdf
Explanation: The above code is for forward elimination section of gaussian elimination.The matrix A and vector B are looped through and each equation is then set as a pivot.
This pivot is then sent to each process as are the remaining pivot +1 to n equations.
Process 0 is the master, it hhandles many aspects of the communication. MPI_ScatterV is used to distribute the data.
Along with MPI_GatherV varing ammount of information can be distributed. MPI_Scatter is then used to distribute the chunk vector
calculated from matrix A, (MPI_ScatterV cannot be used because each process does not know the chunk size beforehand, so instead of having them calculate this size
MPI_Scatter is used). Matrix A has been distributed to create an even workload since as it's looped through the ammound of rows used
decreases. Since fortran stored data sent/recieved by Scatterv in column-major order the algorithm is restructured
to use this format and the data is reverted to row-major.
Since the ammount of time to perform the backwards substitution step is
minimal when compared to the forward elimination it is best done sequentially.
The above tables show the time spend doing computations vs network communications for the forward elimination phase.
The most important aspect of Gaussian Elimination is communication times. Since the algorithm relies on so much
data related work ( as opposed to task related) the communication time of the MPI non-shared memory
implimentation vastly overshadows the workload time. Therefore this MPI solution is inferior to a
shared-memory implimentation on the same machine.
Code
This Gaussian Elimination example by Farhan Ahmad uses the standard
algorithm with back-substitution to solve a linear system. It is
implemented in C++ using standard CUDA C extensions. Data is read from
a text file to load the matrices. You can view and download Ahmad's
source code here.
main.cpp
#include<stdio.h>
#include<conio.h>
#include "Common.h"
#include<stdlib.h>
int main(int argc , char **argv)
{
float *a_h = NULL ;
float *b_h = NULL ;
float *result , sum ,rvalue ;
int numvar ,j ;
numvar = 0;
// Reading the file to copy values
printf("\t\tShowing the data read from file\n\n");
getvalue(&a_h , &numvar);
//Allocating memory on host for b_h
b_h = (float*)malloc(sizeof(float)*numvar*(numvar+1));
//Calling device function to copy data to device
DeviceFunc(a_h , numvar , b_h);
//Showing the data
printf("\n\n");
for(int i =0 ; i< numvar ;i++)
{
for(int j =0 ; j< numvar+1; j++)
{
printf("%f\n",b_h[i*(numvar+1) + j]);
}
printf("\n");
}
//Using Back substitution method
result = (float*)malloc(sizeof(float)*(numvar));
for(int i = 0; i< numvar;i++)
{
result[i] = 1.0;
}
for(int i=numvar-1 ; i>=0 ; i--)
{
sum = 0.0 ;
for( j=numvar-1 ; j>i ;j--)
{
sum = sum + result[j]*b_h[i*(numvar+1) + j];
}
rvalue = b_h[i*(numvar+1) + numvar] - sum ;
result[i] = rvalue / b_h[i *(numvar+1) + j];
}
//Displaying the result
printf("\n\t\tVALUES OF VARIABLES\n\n");
for(int i =0;i<numvar;i++)
{
printf("[X%d] = %+f\n", i ,result[i]);
}
_getch();
return 0;
}
Kernel.cu
//Kernel function that executes on the device
#include "Common.h"
#include<cuda.h>
__device__ __global__ void Kernel(float *a_d , float *b_d ,int size)
{
int idx = threadIdx.x ;
int idy = threadIdx.y ;
//int width = size ;
//int height = size ;
//Allocating memory in the share memory of the device
__shared__ float temp[16][16];
//Copying the data to the shared memory
temp[idy][idx] = a_d[(idy * (size+1)) + idx] ;
for(int i =1 ; i<size ;i++)
{
if((idy + i) < size) // NO Thread divergence here
{
float var1 =(-1)*( temp[i-1][i-1]/temp[i+idy][i-1]);
temp[i+idy][idx] = temp[i-1][idx] +((var1) * (temp[i+idy ][idx]));
}
__syncthreads(); //Synchronizing all threads before Next iterat ion
}
b_d[idy*(size+1) + idx] = temp[idy][idx];
}
DeviceFunc.cu
//Assigning memory on device and defining Thread Block size
// Call to the Kernel(function) that will run on the GPU
#include<cuda.h>
#include<stdio.h>
#include "Common.h"
__device__ __global__ void Kernel(float *, float * ,int );
void DeviceFunc(float *temp_h , int numvar , float *temp1_h)
{
float *a_d , *b_d;
//Memory allocation on the device
cudaMalloc(&a_d,sizeof(float)*(numvar)*(numvar+1));
cudaMalloc(&b_d,sizeof(float)*(numvar)*(numvar+1));
//Copying data to device from host
cudaMemcpy(a_d, temp_h, sizeof(float)*numvar*(numvar+1),cudaMemcpyHostTo Device);
//Defining size of Thread Block
dim3 dimBlock(numvar+1,numvar,1);
dim3 dimGrid(1,1,1);
//Kernel call
Kernel<<<dimGrid , dimBlock>>>(a_d , b_d , numvar);
//Coping data to host from device
cudaMemcpy(temp1_h,b_d,sizeof(float)*numvar*(numvar+1),cudaMemcpyDeviceT oHost);
//Deallocating memory on the device
cudaFree(a_d);
cudaFree(b_d);
}
fread.cpp
//Reading from file
#include<stdio.h>
#include<stdlib.h>
#include<math.h>
#include<conio.h>
#include "Common.h"
void copyvalue(int , int * , FILE *,float*); // Function prototype
void getvalue(float **temp_h , int *numvar) {
FILE *data ;
int newchar ,index ;
index = 0;
data = fopen("B:\\data.txt","r");
if(data == NULL) // if file does not exist
{
perror("data.txt");
exit(1);
}
//First line contains number of variables
while((newchar = fgetc(data)) != '\n')
{
*numvar = (*numvar) * 10 + (newchar-48) ;
}
printf("\nNumber of variables = %d\n",*numvar);
//Allocating memory for the array to store coefficients
*temp_h = (float*)malloc(sizeof(float)*(*numvar)*(*numvar+1));
while(1)
{
//Reading the remaining data
newchar = fgetc(data);
if(feof(data))
{
break; '
}
if(newchar == ' ')
{
printf(" ");
continue;
}
else if(newchar == '\n')
{
printf("\n\n");
continue;
}
else if((newchar >=48 && newchar <=57) newchar == '-')
{
ungetc(newchar,data);
copyvalue(newchar,&index,data,*temp_h);
}
else {
printf("\nError:Unexpected symbol %c found",newchar);
_getch();
exit(1);
}
}
}
// copying the value from file to array
void copyvalue(int newchar,int *i , FILE *data , float *temp_h)
{
float sum , sumfrac ;
double count ;
int ch;
int ptPresent = 0;
float sign;
sum = sumfrac = 0.0;
count = 1.0;
if(newchar == '-')
{
sign = -1.0;
fgetc(data);
}
else
{
sign = 1.0;
}
while(1)
{
ch = fgetc(data);
if(ch == '\n' ch == ' ')
{
ungetc(ch ,data);
break;
}
else if(ch == '.')
{
ptPresent = 1;
break;
}
else
{
sum = sum*10 + ch-48;
}
}
if(ptPresent)
{
while(1)
{
ch = fgetc(data);
if(ch == ' ' ch == '\n')
{
ungetc(ch , data);
break;
}
else
{
sumfrac = sumfrac + ((float)(ch-48))/pow(10.0,count);
count++;
}
}
}
temp_h[*i] = sign*(sum + sumfrac) ;
printf("[%f]",temp_h[*i]);
(*i)++;
}
common.h
#ifndef __Common_H
#define __Common_H
#endif
void getvalue(float ** ,int *);
void DeviceFunc(float * , int , float *);
The code is relatively straightforward. Because it is done in C++, the
main function is compiled separately from the CUDA code. This
portion of the program is run on the host's standard processor like a
regular C++ program. It reads in the data from an external file. then
transfers control to the device in DeviceFunc.cu. Here, memory is
allocated and transferred from the main processor into the graphics
processing unit. It prepares an execution configuration and then launches
the kernel, which is the actual Gaussian Elimination code run in parallel
by the GPU.
Although the "typical" Gaussian elimination can be done in CUDA, several
studies have found that there are more efficient ways of parallelizing
the algorithm by making some adjustments. In one study by Xinggao Xia
and Jong Chul Lee, rather than clearing only the rows before the pivot,
all other rows are reduced to zero. Once each column is complete, no
back-substitution is required. Partial pivoting is also used to ensure
the accuracy of the answer.
In a different study by Aydin Buluc, John Gilbert, and Ceren Budak,
they noted that while recursion is not possible on a CUDA GPU, it is on
the host CPU. If recursion is used on the host, it separates the
recursion stack from the floating-point operations done by the GPU, so
that one does not interfere with the other. They use this so-called
"recursive optimized" technique, along with other improvements like
memory coalescing and optimized primitive variables in order to attain
maximum speedup.
Xia and Lee's presentation can be found
here.
Buluc et. al.'s paper on different Gaussian-Elimination style
algorithms for GPGPU can be found here.